通用具身智能技術公司跨維智能完成戰略輪融資,聯想創投領投
近日,高通用性具身智能技術研發公司「跨維智能」完成由聯想創投領投的戰略輪融資,融資資金將主要用于產品研發、團隊擴充和市場拓展等方面。
跨維智能成立于2021年6月,是一家以Sim2Real為核心,研發高通用性具身智能技術的國家高新技術企業。跨維智能憑借在3D生成式AI、多模態大模型及三維成像方面的長期技術積累,基于Sim2Real打造軟硬一體產品矩陣,且已在多場景中實現商業化落地,是具身智能規模化商業落地的引領者。
通用具身智能的發展與落地路徑
聯想集團高級副總裁、聯想創投集團總裁賀志強介紹:具身智能作為AI與物理世界交互的載體,具有高度通用性和泛化性的核心特點。傳統機器人為單一或固定任務設計,泛化性較差,難以完成復雜或未知任務,并且需要大量的編程、示教,部署復雜、時間成本高。而具身智能具有高通用性,可在各類場景完成復雜任務。聯想創投作為聯想集團旗下的全球科技產業基金,十年來堅持投資AI機器人領域,不僅是基于對具身智能的信仰,也是作為聯想的CVC和科技瞭望塔的定位與使命。此次對跨維智能的投資,也是聯想創投長期看好跨維智能在具身智能路徑的選擇以及商業化落地的領先性。
具身智能宏觀地講包含“具身”與“智能”的結合,智能是為不同具身形態的機器人/物理智能體服務的。這些具身形態可以包含主要應用于非結構化場景下(例如商業、家庭等)的人形機器人,也可以包含人形上肢、靈巧手,甚至是應用于各種半結構化場景下(例如工業、物流等)的傳統形態機械臂/協作臂與特種機器人,以及更廣義的無人車、無人機等。跨維智能認為后者應該是當前具身智能技術發展和落地的重點考慮對象。為服務于不同形態的物理智能體,智能技術本身也應該不同于以人為服務目標的當前的大模型技術(例如ChatGPT、Sora等服務于知識搜索和分享,內容創作等)。
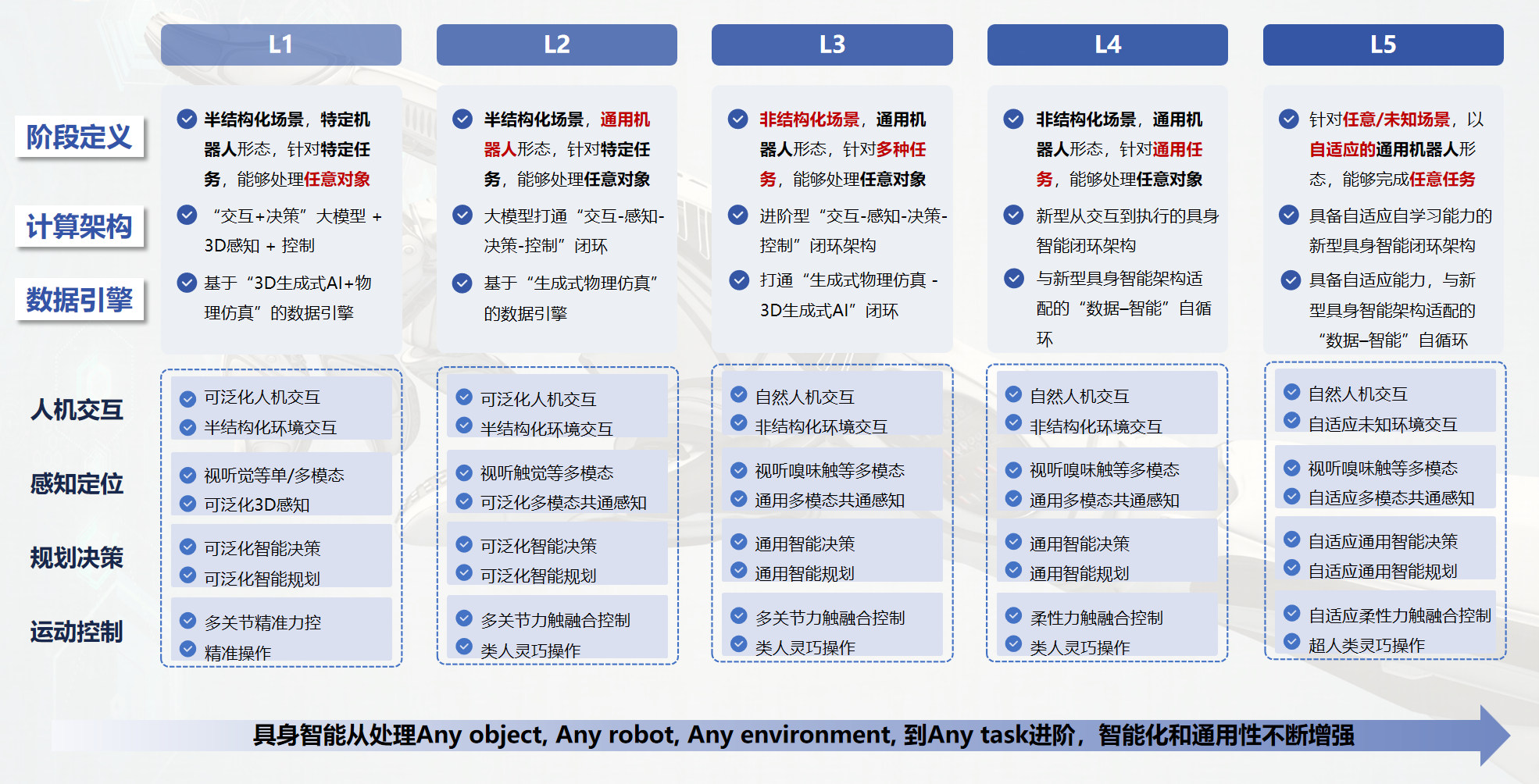
跨維智能創始人賈奎認為:隨著操作對象、環境和任務復雜性逐漸增強,通用具身智能將會經歷L1-L5五個階段。從半結構化場景和特定機器人形態處理特定任務,逐步升級到對任意/未知場景,以自適應的通用機器人形態,完成任意任務。
具身智能學習需要海量的帶標注數據,而真正實現具身智能的落地,更需要海量的高精度高質量和豐富標注類型的數據。不同于LLM/VLM等大模型的訓練,訓練具身智能大模型的數據是與物理智能體相關的,是在物理世界絕對坐標系下的精確測量數據,在數據獲取難度、數據獲取成本、標注周期等因素都會存在多重掣肘,極大影響具身智能落地的周期及成本。因而通過仿真獲取合成數據成為了一個必然的選擇。
跨維智能的進階之路:自研仿真引擎、3D大模型、AnyGrasp
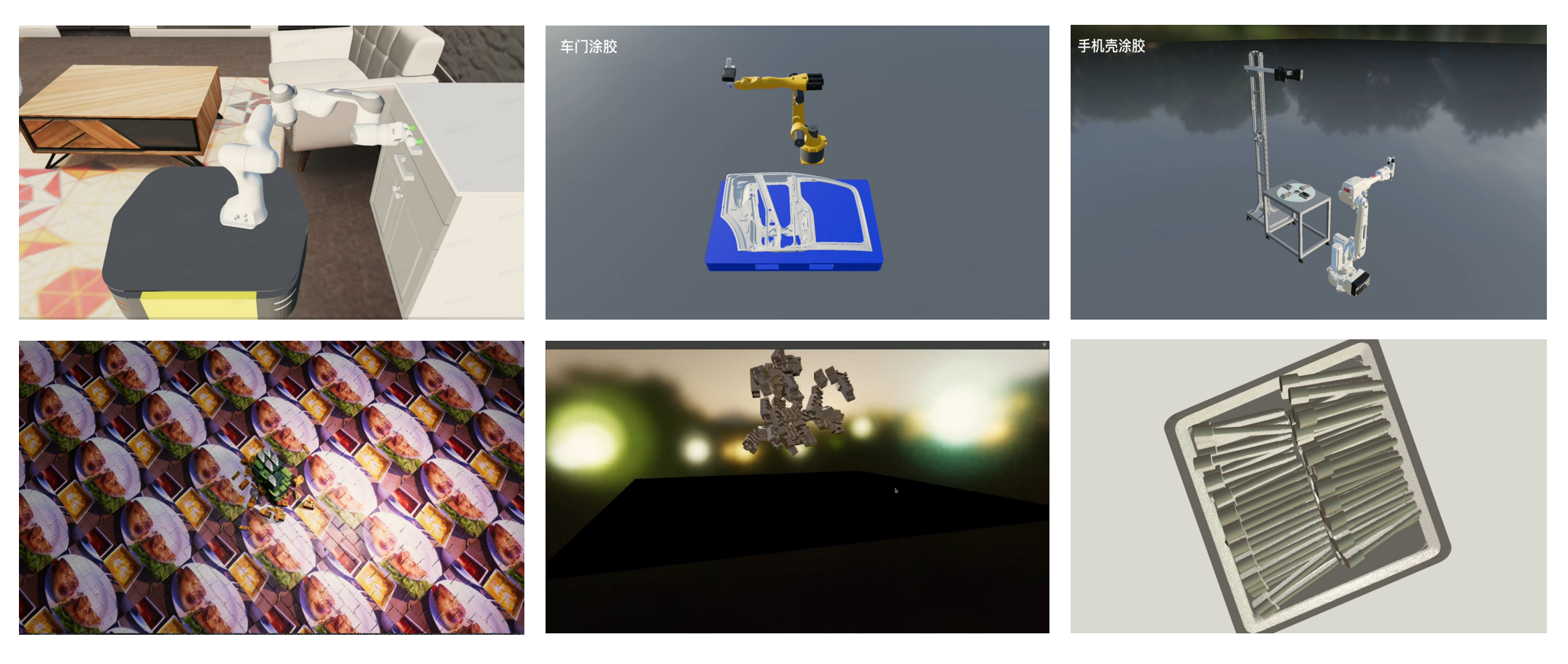
跨維智能創始人賈奎表示:Sim2Real是通過物理仿真機器人操作場景,并引入各種與任務相關的真實世界的干擾(視覺的、物理的、任務描述的干擾,環境distractors等),再通過渲染、軌跡數據記錄、關節數據記錄等方式形成海量的帶絕對精確標準的合成數據,用這樣的合成數據訓練具身智能大模型。
跨維智能以Sim2Real為核心,持續打造底層技術核心能力。打造了獨有的DexVerse?數據與具身智能仿真引擎,用于數據生成與大模型訓練。該引擎基于概率建模的程序化生成仿真方案與生成式AI技術相結合,解決現有技術無法合成形式多樣的高質量三維仿真數據資產、以及難以人為介入控制所導致生成不遵循現實物理約束的缺陷,實現高效零成本且更加真實可靠的仿真數據生成引擎,具備低成本獲取海量豐富數字資產的能力,為持續低成本生成數據打造了堅實的數據資產基礎。同時,結合在具身智能多模態大模型上的長期積累,跨維智能打造了基于3D VLA (3D Vision Language Action) 大模型的成像感知套件,從而逐階段支撐各行業趨近實現AnyGrasp/AnyManipulation,而不是針對不同的操作對象進行定制的任務編程。
聯想創投史晨星認為:跨維智能擁有最優秀的Sim2Real和大模型相關技術,是實現高通用性具身智能的核心底座。目前跨維智能依托Sim2Real和相關技術,在具身智能領域擁有深厚產品積累,已打造軟硬一體產品矩陣,包含基于3D生成式AI的Sim2Real AI引擎、基于3D VLA大模型的成像感知套件,并且在具身智能領域商業化落地處于領先位置。
由半結構化啟程,邁向全場景非結構化通用智能
如前所述,跨維智能優先將技術應用在大規模的半結構化場景:如工業制造領域。通過賦能較為成熟的機械臂/機器人,在半導體、汽車、光伏等行業均已有較好的落地應用,跨維方案對比傳統技術能有效地節省大量部署時間,降低成本,提升穩定性及通用性,支撐柔性化生產。
跨維智能創始人賈奎透露:公司未來會根據通用性本身的技術發展軌跡,依次覆蓋從半結構化到非結構化場景。如典型的工業/協作機械臂場景,逐步實現支撐(接近)任意物體與場景抓取/操作的具身智能成像、感知與控制系統、支撐在各類機器人上快速自動完成新任務部署的機器人控制器、能夠自主完成單輪及多輪任務的自主機器人系統。以上實現后,也將開啟通用/人形機器人在包括家庭在內的更廣泛場景落地的可能性。
猜你喜歡

高通用性具身智能技術研發商“跨維智能”完成數億元A1和A2輪融資
成都科創投、洪泰基金領投,天鷹資本、四川院士基金、南山戰新投、一村資本、探元創投等跟投,老股東聯想創投等持續加碼。?派得新能源獲聯想創投等數千萬天使投資,孵化于香港科技大學霍英東研究院
本輪融資將用于企業進一步研發與生產氫能經濟結構中電轉氫、氫轉電關鍵環節的催化劑產品。

 獵云網
獵云網